Ubuntu で ROS melodic 版のビルドとインストール
【目次】
前準備
Ubuntu のシステム更新
Ubuntu で OS のシステム更新を行うときは, 端末で,次のコマンドを実行する.
Ubuntu で OS のシステム更新を行うときは, 端末で,次のコマンドを実行する。これは、パッケージ情報を最新の状態に保ち、インストール済みのパッケージをセキュリティアップデートやバグ修正を含めて更新するためである。
# パッケージリストの情報を更新
sudo apt update
# インストール済みのパッケージを包括的に更新 (依存関係も考慮)
sudo apt full-upgrade
# カーネル更新等で実際に再起動が必要な場合のみ実行を推奨
# sudo shutdown -r now
C/C++ コンパイラと Make とビルドツールのインストール
ソフトウェアをソースコードからビルドするには、C/C++コンパイラ (通常はGCC) や make ユーティリティといった開発ツールが重要である。Ubuntuでは、これらのツールは build-essential パッケージにまとめられている。インストールするには,端末で,次のコマンドを実行する。
sudo apt -y install build-essential libtool texinfo dpkg-dev pkg-config
libtool, texinfo, dpkg-dev, pkg-config は、より複雑なビルドやパッケージ管理の際に役立つ開発関連ツールである。
Ubuntu で ROS melodic 版ののビルドとインストール
http://wiki.ros.org/melodic/Installation/Source の記述に従うインストール作業を開始するためのソフトウェアのインストール
# パッケージリストの情報を更新
sudo apt update
sudo apt -y install python-rosdep python-rosinstall-generator python-wstool python-rosinstall

いくつかの前準備
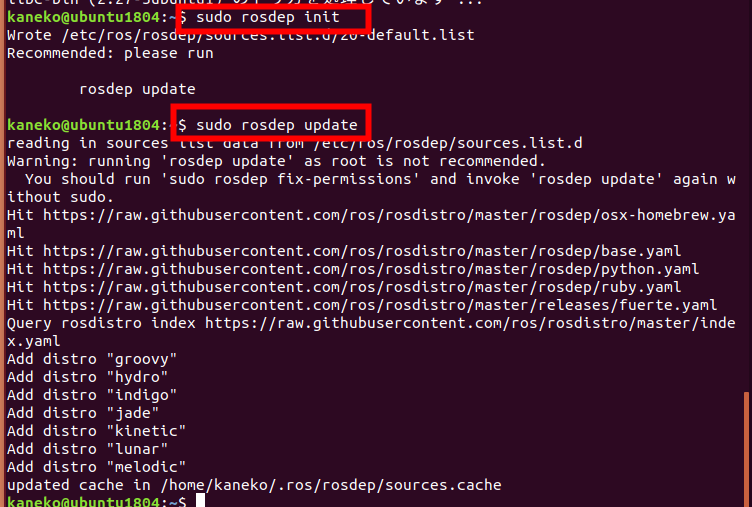
- rosdep の初期化と更新
sudo rosdep init sudo rosdep update
- ワークスペースの生成
mkdir rosws cd rosws rosinstall_generator desktop_full --rosdistro melodic --deps --wet-only --tar > melodic-desktop-full-wet.rosinstall wstool init -j8 src melodic-desktop-full-wet.rosinstall
- 前提ソフトウェアのインストール
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
- ワークスペースの構築
rosdep update sudo apt -y install python-pip sudo pip install -U catkin_pkg ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release
ROS の更新
ROSを最新版に更新する手順を示す- rosinstallファイルの待避と,その最新版の生成
mv -i melodic-desktop-full-wet.rosinstall melodic-desktop-full-wet.rosinstall.old rosinstall_generator desktop_full --rosdistro melodic --deps --wet-only --tar > melodic-desktop-full-wet.rosinstall diff -u melodic-desktop-full-wet.rosinstall melodic-desktop-full-wet.rosinstall.old
- ワークスペースの更新
wstool merge -t src melodic-desktop-full-wet.rosinstall wstool update -t src
- ワークスペースのリビルド
./src/catkin/bin/catkin_make_isolated --install