Ultralytics ReID統合版によるマルチオブジェクトトラッキング(ソースコードと実行結果)
Python開発環境,ライブラリ類
ここでは、最低限の事前準備について説明する。機械学習や深層学習を行う場合は、NVIDIA CUDA、Visual Studio、Cursorなどを追加でインストールすると便利である。これらについては別ページ https://www.kkaneko.jp/cc/dev/aiassist.htmlで詳しく解説しているので、必要に応じて参照してください。
Python 3.12 のインストール
インストール済みの場合は実行不要。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要である。
REM Python をシステム領域にインストール
winget install --scope machine --id Python.Python.3.12 -e --silent --accept-source-agreements --accept-package-agreements
REM Python のパス設定
set "PYTHON_PATH=C:\Program Files\Python312"
set "PYTHON_SCRIPTS_PATH=C:\Program Files\Python312\Scripts"
echo "%PATH%" | find /i "%PYTHON_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_PATH%" /M >nul
echo "%PATH%" | find /i "%PYTHON_SCRIPTS_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_SCRIPTS_PATH%" /M >nul【関連する外部ページ】
Python の公式ページ: https://www.python.org/
AI エディタ Windsurf のインストール
Pythonプログラムの編集・実行には、AI エディタの利用を推奨する。ここでは,Windsurfのインストールを説明する。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行して、Windsurfをシステム全体にインストールする。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要となる。
winget install --scope machine --id Codeium.Windsurf -e --silent --accept-source-agreements --accept-package-agreements【関連する外部ページ】
Windsurf の公式ページ: https://windsurf.com/
必要なライブラリをシステム領域にインストール
コマンドプロンプトを管理者として実行(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する
pip install -U torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu126
pip install ultralytics opencv-python pillow lap
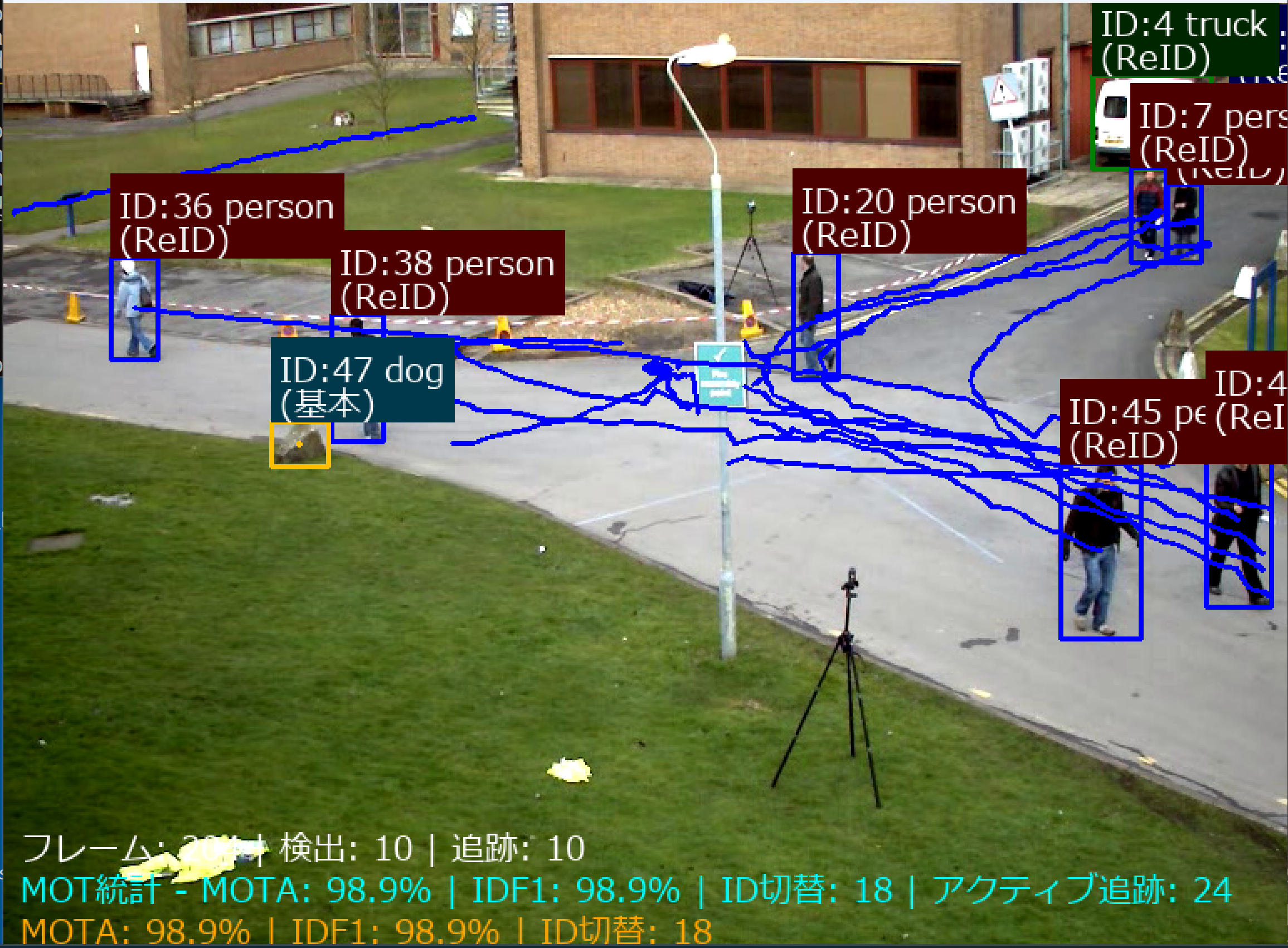
Ultralytics ReID統合版によるマルチオブジェクトトラッキング
概要
ソースコード
# -*- coding: utf-8 -*-
"""
Ultralytics ReID統合版によるマルチオブジェクトトラッキング
"""
import cv2
import tkinter as tk
from tkinter import filedialog
import os
import numpy as np
from ultralytics import YOLO
from PIL import Image, ImageDraw, ImageFont
import urllib.request
import time
import yaml
# 設定値
CONFIDENCE_THRESHOLD = 0.3
REID_CONFIDENCE_THRESHOLD = 0.5
TRACK_HIGH_THRESH = 0.25
TRACK_LOW_THRESH = 0.1
NEW_TRACK_THRESH = 0.25
TRACK_BUFFER = 30
MATCH_THRESH = 0.8
APPEARANCE_THRESH = 0.25
PROXIMITY_THRESH = 0.5
DISPLAY_INTERVAL = 1.0
FONT_SIZE = 20
FONT_PATH = 'C:/Windows/Fonts/meiryo.ttc'
# COCO 80クラス色パレット
CLASS_COLORS = [
(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (255, 0, 255),
(0, 255, 255), (128, 0, 0), (0, 128, 0), (0, 0, 128), (128, 128, 0),
(128, 0, 128), (0, 128, 128), (192, 192, 192), (128, 128, 128), (255, 165, 0),
(255, 20, 147), (0, 191, 255), (255, 69, 0), (255, 140, 0), (173, 255, 47),
(240, 230, 140), (220, 20, 60), (0, 100, 0), (255, 105, 180), (75, 0, 130),
(255, 215, 0), (186, 85, 211), (147, 112, 219), (218, 112, 214), (255, 182, 193),
(176, 196, 222), (255, 160, 122), (205, 92, 92), (240, 128, 128), (221, 160, 221),
(255, 228, 181), (255, 222, 173), (245, 222, 179), (222, 184, 135), (210, 180, 140),
(188, 143, 143), (105, 105, 105), (119, 136, 153), (112, 128, 144), (47, 79, 79),
(85, 107, 47), (154, 205, 50), (127, 255, 0), (255, 127, 80), (255, 99, 71),
(255, 215, 0), (255, 20, 147), (255, 69, 0), (255, 140, 0), (255, 165, 0),
(255, 192, 203), (160, 82, 45), (205, 133, 63), (72, 61, 139), (106, 90, 205),
(123, 104, 238), (72, 209, 204), (199, 21, 133), (25, 25, 112), (255, 0, 255),
(255, 20, 147), (138, 43, 226), (30, 144, 255), (255, 105, 180), (255, 69, 0),
(255, 140, 0), (70, 130, 180), (176, 224, 230), (139, 69, 19), (160, 82, 45),
(210, 105, 30), (205, 92, 92), (184, 134, 11), (218, 165, 32), (238, 203, 173)
]
def get_class_color(class_id):
if class_id < len(CLASS_COLORS):
return CLASS_COLORS[class_id]
else:
np.random.seed(class_id)
return tuple(np.random.randint(0, 255, 3).tolist())
def create_botsort_config():
return {
'tracker_type': 'botsort',
'track_high_thresh': TRACK_HIGH_THRESH,
'track_low_thresh': TRACK_LOW_THRESH,
'new_track_thresh': NEW_TRACK_THRESH,
'track_buffer': TRACK_BUFFER,
'match_thresh': MATCH_THRESH,
'fuse_score': True,
'gmc_method': 'sparseOptFlow',
'with_reid': True,
'model': 'auto',
'proximity_thresh': PROXIMITY_THRESH,
'appearance_thresh': APPEARANCE_THRESH
}
def save_tracker_config(config):
config_path = "botsort_reid.yaml"
with open(config_path, 'w', encoding='utf-8') as f:
yaml.dump(config, f, default_flow_style=False, allow_unicode=True)
return config_path
class MOTMetrics:
def __init__(self):
self.total_detections = 0
self.total_tracks = 0
self.active_tracks = set()
self.track_history = {}
self.id_switches = 0
self.processing_times = []
self.previous_tracks = {}
self.frame_count = 0
def update(self, detections_data, processing_time):
self.frame_count += 1
self.processing_times.append(processing_time)
current_tracks = {}
detection_count = len(detections_data)
track_count = 0
for detection in detections_data:
self.total_detections += 1
if detection['tracker_id'] is not None:
track_id = detection['tracker_id']
track_count += 1
current_tracks[track_id] = {
'center': detection['center'],
'confidence': detection['confidence']
}
if track_id not in self.track_history:
self.track_history[track_id] = []
self.track_history[track_id].append(self.frame_count)
self.active_tracks.add(track_id)
self.total_tracks += track_count
self._detect_id_switches(current_tracks)
self.previous_tracks = current_tracks.copy()
def _detect_id_switches(self, current_tracks):
if not self.previous_tracks or not current_tracks:
return
for prev_id, prev_data in self.previous_tracks.items():
prev_center = prev_data['center']
min_distance = float('inf')
closest_id = None
for curr_id, curr_data in current_tracks.items():
curr_center = curr_data['center']
distance = np.sqrt((prev_center[0] - curr_center[0])**2 +
(prev_center[1] - curr_center[1])**2)
if distance < min_distance:
min_distance = distance
closest_id = curr_id
if closest_id and min_distance < 50 and closest_id != prev_id:
if prev_id not in current_tracks:
self.id_switches += 1
def calculate_mot_metrics(self):
if self.total_detections == 0:
return {
'MOTA': 0.0, 'MOTP': 0.0, 'IDP': 0.0, 'IDR': 0.0, 'IDF1': 0.0,
'ID_Switches': 0, 'False_Negatives': 0, 'Total_Tracks': 0,
'Avg_Processing_Time': 0
}
fn = self.total_detections - self.total_tracks
fp = max(0, self.total_tracks - self.total_detections)
ids = self.id_switches
mota = max(0.0, 1.0 - (fn + fp + ids) / max(1, self.total_detections))
motp = self.total_tracks / max(1, self.total_detections)
idp = max(0.0, (self.total_tracks - ids) / max(1, self.total_tracks))
idr = max(0.0, (self.total_tracks - ids) / max(1, self.total_detections))
idf1 = 2 * (idp * idr) / max(0.001, idp + idr)
return {
'MOTA': mota * 100, 'MOTP': motp * 100, 'IDP': idp * 100,
'IDR': idr * 100, 'IDF1': idf1 * 100, 'ID_Switches': ids,
'False_Negatives': fn, 'Total_Tracks': len(self.active_tracks),
'Avg_Processing_Time': np.mean(self.processing_times) if self.processing_times else 0
}
def get_stats_text(self):
if self.frame_count == 0:
return "MOT統計: 初期化中"
metrics = self.calculate_mot_metrics()
return (f"MOT統計 - MOTA: {metrics['MOTA']:.1f}% | "
f"IDF1: {metrics['IDF1']:.1f}% | "
f"ID切替: {metrics['ID_Switches']} | "
f"アクティブ追跡: {metrics['Total_Tracks']}")
def process_frame(frame, model, tracker_config_path, font, log, frame_count, last_print_time, mot_metrics):
start_time = time.time()
try:
results = model.track(
frame, persist=True, conf=CONFIDENCE_THRESHOLD,
tracker=tracker_config_path, verbose=False
)
result = results[0]
detections_data = []
detection_count = 0
tracked_count = 0
if result.boxes is not None:
boxes = result.boxes
detection_count = len(boxes.xyxy)
has_tracker_ids = hasattr(boxes, 'id') and boxes.id is not None
for i in range(detection_count):
x1, y1, x2, y2 = boxes.xyxy[i].cpu().numpy()
center_x = (x1 + x2) / 2
center_y = (y1 + y2) / 2
confidence = boxes.conf[i].cpu().numpy() if boxes.conf is not None else 0.0
class_name = "object"
class_id = 0
if boxes.cls is not None and hasattr(result, 'names'):
class_id = int(boxes.cls[i].cpu().numpy())
class_name = result.names.get(class_id, "object")
if has_tracker_ids and i < len(boxes.id):
tracker_id = int(boxes.id[i].cpu().numpy())
tracked_count += 1
else:
tracker_id = None
reid_applied = confidence > REID_CONFIDENCE_THRESHOLD
detections_data.append({
'bbox': (int(x1), int(y1), int(x2), int(y2)),
'center': (center_x, center_y),
'confidence': confidence,
'class_name': class_name,
'class_id': class_id,
'tracker_id': tracker_id,
'reid_applied': reid_applied
})
processing_time = time.time() - start_time
mot_metrics.update(detections_data, processing_time)
# フレーム描画
ann_frame = frame.copy()
if detections_data:
current_time = time.strftime("%Y-%m-%d %H:%M:%S")
# まず OpenCV で四角を描画
for detection in detections_data:
x1, y1, x2, y2 = detection['bbox']
class_id = detection['class_id']
bbox_color = get_class_color(class_id)
# バウンディングボックス描画(クラス別色)
cv2.rectangle(ann_frame, (x1, y1), (x2, y2), bbox_color, 2)
# 次に PIL でテキストを描画
img_pil = Image.fromarray(cv2.cvtColor(ann_frame, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(img_pil)
for detection in detections_data:
x1, y1, x2, y2 = detection['bbox']
class_id = detection['class_id']
class_name = detection['class_name']
bbox_color = get_class_color(class_id)
if detection['tracker_id'] is not None:
main_text = f"ID:{detection['tracker_id']} {class_name}"
reid_status = "ReID" if detection['reid_applied'] else "基本"
status_text = f"({reid_status})"
else:
main_text = f"{class_name} (検出)"
status_text = ""
text_bg_color = tuple(int(c * 0.3) for c in bbox_color)
text_color = (255, 255, 255)
try:
bbox = draw.textbbox((0, 0), main_text, font=font)
text_width = bbox[2] - bbox[0]
except AttributeError:
text_size = draw.textsize(main_text, font=font)
text_width = text_size[0]
bg_height = 50 if status_text else 30
# テキスト背景をPILで描画
draw.rectangle([x1, y1-bg_height, x1 + text_width + 10, y1], fill=text_bg_color)
draw.text((x1 + 5, y1-45), main_text, font=font, fill=text_color)
if status_text:
draw.text((x1 + 5, y1-25), status_text, font=font, fill=text_color)
log_entry = (f"{current_time},ID:{detection['tracker_id']},クラス:{detection['class_name']},"
f"信頼度:{detection['confidence']:.3f},ReID:{detection['reid_applied']},"
f"座標:({detection['center'][0]:.1f},{detection['center'][1]:.1f})")
log.append(log_entry)
ann_frame = cv2.cvtColor(np.array(img_pil), cv2.COLOR_RGB2BGR)
# 統計情報表示
img_pil_status = Image.fromarray(cv2.cvtColor(ann_frame, cv2.COLOR_BGR2RGB))
draw_status = ImageDraw.Draw(img_pil_status)
status_text = f"フレーム: {frame_count} | 検出: {detection_count} | 追跡: {tracked_count}"
draw_status.text((10, ann_frame.shape[0] - 85), status_text, font=font, fill=(255, 255, 255))
mot_stats_text = mot_metrics.get_stats_text()
draw_status.text((10, ann_frame.shape[0] - 60), mot_stats_text, font=font, fill=(0, 255, 255))
mot_detailed = mot_metrics.calculate_mot_metrics()
detailed_text = f"MOTA: {mot_detailed['MOTA']:.1f}% | IDF1: {mot_detailed['IDF1']:.1f}% | ID切替: {mot_detailed['ID_Switches']}"
draw_status.text((10, ann_frame.shape[0] - 35), detailed_text, font=font, fill=(255, 165, 0))
ann_frame = cv2.cvtColor(np.array(img_pil_status), cv2.COLOR_RGB2BGR)
# 定期出力
current_time_sec = time.time()
if current_time_sec - last_print_time >= DISPLAY_INTERVAL:
if detections_data:
print(f"\n[フレーム {frame_count}] 検出: {detection_count} | 追跡: {tracked_count}")
print(f"MOTA: {mot_detailed['MOTA']:.2f}% | IDF1: {mot_detailed['IDF1']:.2f}% | ID切替: {mot_detailed['ID_Switches']}")
last_print_time = current_time_sec
return ann_frame, last_print_time
except Exception as e:
print(f"トラッキングエラー: {e}")
return frame, last_print_time
def main():
print("=" * 60)
print("マルチオブジェクトトラッキングシステム")
print("=" * 60)
print("\n【入力ソース選択】")
print("0: 動画ファイル")
print("1: カメラ")
print("2: サンプル動画")
choice = input("\n選択してください: ")
temp_file = None
log = []
print("\nシステム初期化中...")
try:
model = YOLO("yolo11n.pt")
print("✓ YOLO11モデル読み込み完了")
tracker_config = create_botsort_config()
tracker_config_path = save_tracker_config(tracker_config)
print("✓ トラッカー設定完了")
font = ImageFont.truetype(FONT_PATH, FONT_SIZE)
print("✓ フォント設定完了")
mot_metrics = MOTMetrics()
print("✓ MOT評価指標初期化完了")
print("初期化完了!")
except Exception as e:
print(f"初期化エラー: {e}")
return
# 入力ソース設定
if choice == '0':
print("動画ファイルを選択してください...")
root = tk.Tk()
root.withdraw()
path = filedialog.askopenfilename(
title="動画ファイルを選択",
filetypes=[("動画ファイル", "*.mp4 *.avi *.mov *.mkv"), ("全ファイル", "*.*")]
)
root.destroy()
if not path:
print("ファイルが選択されませんでした。")
return
cap = cv2.VideoCapture(path)
elif choice == '1':
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
if not cap.isOpened():
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("カメラを開けませんでした。")
return
cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
if not cap.isOpened():
print("カメラを開けませんでした。")
return
elif choice == '2':
url = "https://raw.githubusercontent.com/opencv/opencv/master/samples/data/vtest.avi"
filename = "vtest.avi"
print("サンプル動画をダウンロード中...")
try:
urllib.request.urlretrieve(url, filename)
temp_file = filename
cap = cv2.VideoCapture(filename)
print("サンプル動画準備完了")
except Exception as e:
print(f"サンプル動画ダウンロードエラー: {e}")
return
else:
print("無効な選択です。")
return
print("\nトラッキング開始 - 'q'で終了")
frame_count = 0
last_print_time = time.time()
try:
while True:
ret, frame = cap.read()
if not ret:
print("動画の最後に到達しました。")
break
frame_count += 1
processed_frame, last_print_time = process_frame(
frame, model, tracker_config_path, font, log, frame_count,
last_print_time, mot_metrics
)
cv2.imshow('Multi-Object Tracking', processed_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
print("\n終了が要求されました。")
break
except KeyboardInterrupt:
print("\nキーボード割り込みにより終了します。")
except Exception as e:
print(f"処理中にエラー: {e}")
finally:
cap.release()
cv2.destroyAllWindows()
if temp_file and os.path.exists(temp_file):
os.remove(temp_file)
if os.path.exists(tracker_config_path):
os.remove(tracker_config_path)
# 結果保存
print("\n処理結果を保存中...")
try:
final_mot_metrics = mot_metrics.calculate_mot_metrics()
with open('tracking_result.txt', 'w', encoding='utf-8') as f:
f.write("トラッキング結果\n")
f.write("=" * 30 + "\n")
f.write(f"MOTA: {final_mot_metrics['MOTA']:.2f}%\n")
f.write(f"IDF1: {final_mot_metrics['IDF1']:.2f}%\n")
f.write(f"ID切替数: {final_mot_metrics['ID_Switches']}\n")
f.write(f"総フレーム数: {frame_count}\n")
f.write(f"総検出数: {mot_metrics.total_detections}\n")
f.write(f"総追跡数: {mot_metrics.total_tracks}\n")
f.write("-" * 30 + "\n")
for log_entry in log:
f.write(log_entry + "\n")
print("結果をtracking_result.txtに保存しました")
print(f"MOTA: {final_mot_metrics['MOTA']:.2f}%")
print(f"IDF1: {final_mot_metrics['IDF1']:.2f}%")
print("プログラム終了")
except Exception as e:
print(f"結果保存エラー: {e}")
if __name__ == "__main__":
main()