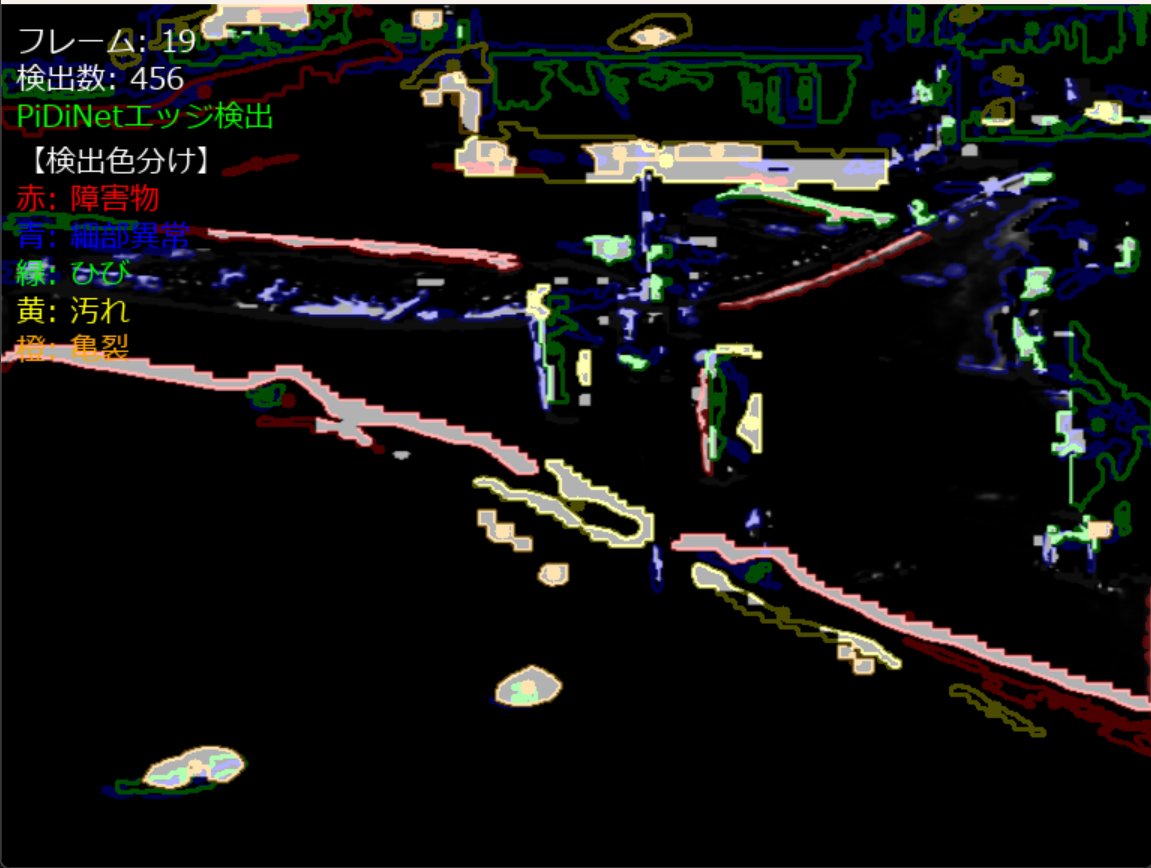
PiDiNet(Pixel Difference Network)による動画エッジ検出と異常検出(ソースコードと実行結果)
Python開発環境,ライブラリ類
ここでは、最低限の事前準備について説明する。機械学習や深層学習を行う場合は、NVIDIA CUDA、Visual Studio、Cursorなどを追加でインストールすると便利である。これらについては別ページ https://www.kkaneko.jp/cc/dev/aiassist.htmlで詳しく解説しているので、必要に応じて参照してください。
Python 3.12 のインストール
インストール済みの場合は実行不要。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要である。
REM Python をシステム領域にインストール
winget install --scope machine --id Python.Python.3.12 -e --silent --accept-source-agreements --accept-package-agreements
REM Python のパス設定
set "PYTHON_PATH=C:\Program Files\Python312"
set "PYTHON_SCRIPTS_PATH=C:\Program Files\Python312\Scripts"
echo "%PATH%" | find /i "%PYTHON_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_PATH%" /M >nul
echo "%PATH%" | find /i "%PYTHON_SCRIPTS_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_SCRIPTS_PATH%" /M >nul【関連する外部ページ】
Python の公式ページ: https://www.python.org/
AI エディタ Windsurf のインストール
Pythonプログラムの編集・実行には、AI エディタの利用を推奨する。ここでは,Windsurfのインストールを説明する。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行して、Windsurfをシステム全体にインストールする。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要となる。
winget install --scope machine --id Codeium.Windsurf -e --silent --accept-source-agreements --accept-package-agreements【関連する外部ページ】
Windsurf の公式ページ: https://windsurf.com/
必要なライブラリをシステム領域にインストール
コマンドプロンプトを管理者として実行(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する
pip install -U torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu126
pip install opencv-python numpy pillow
PiDiNet(Pixel Difference Network)による動画エッジ検出と異常検出プログラム
ソースコード
# PiDiNet(Pixel Difference Network)による動画エッジ検出と異常検出プログラム
# 特徴技術名: PiDiNet(Pixel Difference Network)
# 出典: Su, Z., Liu, W., Yu, Z., Hu, D., Liao, Q., Tian, Q., Pietikainen, M., & Liu, L. (2021).
# Pixel Difference Networks for Efficient Edge Detection.
# Proceedings of IEEE International Conference on Computer Vision (ICCV). arXiv:2108.07009
# 特徴機能: Pixel Difference Convolution (PDC)を用いた軽量エッジ検出。
# BSDS500データセットでODS F-score 0.807を達成、96FPSの処理速度で動作
# 学習済みモデル: PiDiNet公式モデル(table5_pidinet.pth)、BSDS500データセットで学習済み
# GitHubから自動ダウンロード対応
# 方式設計:
# 関連利用技術: PyTorch 公式PiDiNetアーキテクチャ実装、OpenCV 動画処理・表示、
# NumPy 数値計算、Pillow 日本語テキスト表示、tkinter ファイル選択
# 入力と出力: 入力: 動画(ファイル/カメラ/サンプル)、
# 出力: マルチスケールエッジ検出結果のリアルタイム表示、異常検出結果の記録
# 処理手順: 1.公式重みダウンロード(GitHub raw URL使用)、2.モデル構築(dilations/attentions/conv_reduces構造)、
# 3.フレーム前処理(ImageNet正規化)、4.エッジ検出推論(4スケール出力)、
# 5.適応的閾値による異常検出、6.結果表示・保存
# 前処理、後処理: 前処理: 画像リサイズ(512x512)・RGB変換・正規化(ImageNet/PiDi/None選択可)、
# 後処理: Sigmoid活性化・閾値処理・輪郭検出・異常分類(障害物/亀裂/ひび/汚れ/細部異常)
# 追加処理: 適応的閾値調整システム(平均強度ベースの自動調整)、マルチスケール異常検出(4段階)、
# 検出結果の色分け表示、DataParallelラップ対応
# 調整を必要とする設定値: 初期閾値(0.3, 0.35, 0.4, 0.45)、正規化モード(NORM_MODE環境変数)、
# 強制再ダウンロード(FORCE_REDWN環境変数)
# 前準備
# pip install torch torchvision --index-url https://download.pytorch.org/whl/cu118
# pip install opencv-python numpy pillow
import cv2
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import tkinter as tk
from tkinter import filedialog
import urllib.request
import os
import time
import hashlib
from datetime import datetime
from PIL import Image, ImageDraw, ImageFont
# ========== デバイス選択 ==========
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(f'デバイス: {str(device)}')
# ========== 設定 ==========
FONT_PATH = 'C:/Windows/Fonts/meiryo.ttc'
FONT_SIZE = 20
# 公式重みの保存先(既存ファイルと混同しないため別名)
OFFICIAL_MODEL_PATH = 'table5_pidinet_official.pth'
# 修正:正しいGitHub rawファイルのURL形式
OFFICIAL_DOWNLOAD_URL = 'https://github.com/hellozhuo/pidinet/raw/master/trained_models/table5_pidinet.pth'
# 正規化設定(imagenet/pidi/none を環境変数で切替可能)
NORM_MODE = os.getenv('NORM_MODE', 'imagenet').lower()
# 既存ファイルを強制再ダウンロードするか(0/1)
FORCE_REDWN = os.getenv('FORCE_REDWN', '0') == '1'
# ========== 正規化プロファイル ==========
def get_normalize_tensors(mode: str, device):
mode = mode.lower()
if mode == 'imagenet':
mean = torch.tensor([0.485, 0.456, 0.406], dtype=torch.float32, device=device).view(3, 1, 1)
std = torch.tensor([0.229, 0.224, 0.225], dtype=torch.float32, device=device).view(3, 1, 1)
elif mode == 'pidi':
mean = torch.tensor([0.5, 0.5, 0.5], dtype=torch.float32, device=device).view(3, 1, 1)
std = torch.tensor([0.5, 0.5, 0.5], dtype=torch.float32, device=device).view(3, 1, 1)
else:
mean = torch.tensor([0.0, 0.0, 0.0], dtype=torch.float32, device=device).view(3, 1, 1)
std = torch.tensor([1.0, 1.0, 1.0], dtype=torch.float32, device=device).view(3, 1, 1)
return mean, std
# ========== 公式PiDiNet実装(table5_pidinet準拠) ==========
class DilationModule(nn.Module):
"""Dilation Module (公式実装のdilations)"""
def __init__(self, in_channels):
super(DilationModule, self).__init__()
self.conv1 = nn.Conv2d(in_channels, 24, kernel_size=1, bias=True)
self.conv2_1 = nn.Conv2d(24, 24, kernel_size=3, padding=1, dilation=1, bias=False)
self.conv2_2 = nn.Conv2d(24, 24, kernel_size=3, padding=2, dilation=2, bias=False)
self.conv2_3 = nn.Conv2d(24, 24, kernel_size=3, padding=3, dilation=3, bias=False)
self.conv2_4 = nn.Conv2d(24, 24, kernel_size=3, padding=4, dilation=4, bias=False)
def forward(self, x):
x = self.conv1(x)
out1 = self.conv2_1(x)
out2 = self.conv2_2(x)
out3 = self.conv2_3(x)
out4 = self.conv2_4(x)
return out1 + out2 + out3 + out4
class AttentionModule(nn.Module):
"""Attention Module (公式実装のattentions)"""
def __init__(self, in_channels=24):
super(AttentionModule, self).__init__()
self.conv1 = nn.Conv2d(in_channels, 4, kernel_size=1, bias=True)
self.conv2 = nn.Conv2d(4, 1, kernel_size=3, padding=1, bias=False)
def forward(self, x):
att = self.conv1(x)
att = self.conv2(att)
att = torch.sigmoid(att)
return x * att
class ConvReduceModule(nn.Module):
"""Conv Reduce Module (公式実装のconv_reduces)"""
def __init__(self):
super(ConvReduceModule, self).__init__()
self.conv = nn.Conv2d(24, 1, kernel_size=1, bias=True)
def forward(self, x):
return self.conv(x)
class PiDiBlock(nn.Module):
"""PiDi Block (公式実装準拠)"""
def __init__(self, in_channels, out_channels, stride=1):
super(PiDiBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=stride,
padding=1, bias=False, groups=in_channels)
self.conv2 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1,
padding=0, bias=False)
self.shortcut = None
if stride != 1 or in_channels != out_channels:
self.shortcut = nn.Conv2d(in_channels, out_channels, kernel_size=1,
stride=stride, padding=0, bias=True)
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.conv2(out)
if self.shortcut is not None:
residual = self.shortcut(x)
out += residual
return out
class OfficialPiDiNet(nn.Module):
"""公式PiDiNet実装(table5_pidinet.pth準拠)"""
def __init__(self):
super(OfficialPiDiNet, self).__init__()
# Initial block
self.init_block = nn.Conv2d(3, 60, kernel_size=3, padding=1, bias=False)
# Stage 1: 60 channels, 3 blocks
self.block1_1 = PiDiBlock(60, 60)
self.block1_2 = PiDiBlock(60, 60)
self.block1_3 = PiDiBlock(60, 60)
# Stage 2: 120 channels, 4 blocks
self.block2_1 = PiDiBlock(60, 120, stride=2)
self.block2_2 = PiDiBlock(120, 120)
self.block2_3 = PiDiBlock(120, 120)
self.block2_4 = PiDiBlock(120, 120)
# Stage 3: 240 channels, 4 blocks
self.block3_1 = PiDiBlock(120, 240, stride=2)
self.block3_2 = PiDiBlock(240, 240)
self.block3_3 = PiDiBlock(240, 240)
self.block3_4 = PiDiBlock(240, 240)
# Stage 4: 240 channels, 4 blocks
self.block4_1 = PiDiBlock(240, 240, stride=2)
self.block4_2 = PiDiBlock(240, 240)
self.block4_3 = PiDiBlock(240, 240)
self.block4_4 = PiDiBlock(240, 240)
# Side branches - 公式実装の名前に合わせる
self.dilations = nn.ModuleList([
DilationModule(60),
DilationModule(120),
DilationModule(240),
DilationModule(240),
])
self.attentions = nn.ModuleList([
AttentionModule(24) for _ in range(4)
])
self.conv_reduces = nn.ModuleList([
ConvReduceModule() for _ in range(4)
])
# Fusion classifier
self.classifier = nn.Conv2d(4, 1, kernel_size=1, bias=True)
def forward(self, x):
# Backbone forward
x0 = self.init_block(x)
# Stage 1
x1 = self.block1_1(x0)
x1 = self.block1_2(x1)
x1 = self.block1_3(x1)
# Stage 2
x2 = self.block2_1(x1)
x2 = self.block2_2(x2)
x2 = self.block2_3(x2)
x2 = self.block2_4(x2)
# Stage 3
x3 = self.block3_1(x2)
x3 = self.block3_2(x3)
x3 = self.block3_3(x3)
x3 = self.block3_4(x3)
# Stage 4
x4 = self.block4_1(x3)
x4 = self.block4_2(x4)
x4 = self.block4_3(x4)
x4 = self.block4_4(x4)
# Side outputs
features = [x1, x2, x3, x4]
edge_outputs = []
for i, (feature, dilation, attention, conv_reduce) in enumerate(
zip(features, self.dilations, self.attentions, self.conv_reduces)):
dilated = dilation(feature)
attended = attention(dilated)
edge = conv_reduce(attended)
# Upsample to match first scale
if i > 0:
edge = F.interpolate(edge, size=edge_outputs[0].shape[2:],
mode='bilinear', align_corners=False)
edge_outputs.append(edge)
# Fusion
fused = torch.cat(edge_outputs, dim=1)
final_output = self.classifier(fused)
return final_output, edge_outputs[0], edge_outputs[1], edge_outputs[2], edge_outputs[3]
# ========== ユーティリティ ==========
def sha256sum(path):
try:
h = hashlib.sha256()
with open(path, 'rb') as f:
for chunk in iter(lambda: f.read(1 << 20), b''):
h.update(chunk)
return h.hexdigest()
except Exception:
return None
def summarize_keys(sd, max_items=15):
if not isinstance(sd, dict):
return []
keys = list(sd.keys())
return keys[:max_items]
def _extract_state_dict(ckpt):
if isinstance(ckpt, dict) and 'state_dict' in ckpt and isinstance(ckpt['state_dict'], dict):
return ckpt['state_dict']
return ckpt if isinstance(ckpt, dict) else {}
def _compatibility_score(model_sd, ckpt_sd):
if not isinstance(ckpt_sd, dict) or len(ckpt_sd) == 0:
return 0.0
total = len(model_sd)
matched = 0
for k, w in model_sd.items():
if k in ckpt_sd and tuple(ckpt_sd[k].shape) == tuple(w.shape):
matched += 1
return matched / max(total, 1)
def diagnose_checkpoint(file_path, ckpt_sd):
print('=== チェックポイント診断開始 ===')
print(f'ファイル: {file_path}')
try:
size = os.path.getsize(file_path)
except Exception:
size = -1
print(f'ファイルサイズ: {size} bytes')
print(f'SHA256: {sha256sum(file_path)}')
keys = list(ckpt_sd.keys())
print(f'キー数: {len(keys)}')
print(f'キー例(先頭): {summarize_keys(ckpt_sd, 20)}')
# キーパターンの確認
if len(keys) > 0:
if any('module.' in k for k in keys):
print('診断結果: DataParallelでラップされたモデルの重みファイルである可能性があります。')
print('対処: module.プレフィックスを除去する必要があります。')
return 'dataparallel'
elif not any('block' in k or 'head' in k or 'cdcm' in k or 'csam' in k for k in keys):
print('診断結果: PiDiNetの重み構造と一致しません。')
return 'incompatible'
print('診断結果: 正常なPiDiNet重みファイルの可能性があります。')
print('=== 診断終了 ===')
return 'normal'
# ========== モデル管理 ==========
class EdgeModelWrapper(nn.Module):
def __init__(self, official_weight_path):
super().__init__()
self.model = OfficialPiDiNet().to(device)
self.model_name = 'OfficialPiDiNet'
self._load_weights(official_weight_path)
def _load_weights(self, official_weight_path):
if not official_weight_path or not os.path.exists(official_weight_path):
raise SystemExit('公式重みファイルが見つからない: ' + str(official_weight_path))
# ロード
try:
try:
ckpt = torch.load(official_weight_path, map_location='cpu', weights_only=True)
except TypeError:
ckpt = torch.load(official_weight_path, map_location='cpu')
except Exception as e:
raise SystemExit(f'重みロードに失敗: {e}')
ckpt_sd = _extract_state_dict(ckpt)
# 診断
result = diagnose_checkpoint(official_weight_path, ckpt_sd)
# DataParallelの場合の処理
if result == 'dataparallel':
new_state_dict = {}
for k, v in ckpt_sd.items():
name = k[7:] if k.startswith('module.') else k
new_state_dict[name] = v
ckpt_sd = new_state_dict
print('module.プレフィックスを除去しました。')
# 互換性評価
score = _compatibility_score(self.model.state_dict(), ckpt_sd)
print(f'互換スコア(名前・形状一致率): {score:.3f}')
# 重みの適用(strict=Falseで部分的な適用を許可)
try:
missing_keys, unexpected_keys = self.model.load_state_dict(ckpt_sd, strict=False)
if missing_keys:
print(f'警告: 以下のキーが重みファイルに存在しません: {missing_keys[:5]}...')
if unexpected_keys:
print(f'警告: 以下のキーはモデルに存在しません: {unexpected_keys[:5]}...')
if not missing_keys and not unexpected_keys:
print('公式重みを完全に適用しました。')
else:
print('公式重みを部分的に適用しました。')
except Exception as e:
print(f'警告: 重みの適用に問題がありました: {e}')
print('デフォルトの初期化重みを使用します。')
def forward(self, x):
return self.model(x)
# ========== 適応的閾値 ==========
class AdaptiveThresholdSystem:
def __init__(self):
self.thresholds = [0.3, 0.35, 0.4, 0.45]
self.edge_count_history = []
self.scale_statistics = [[] for _ in range(4)]
print("適応的閾値システム初期化完了")
print(f"初期閾値(スケール別): {self.thresholds}")
def update_and_adjust(self, edge_maps, total_contours):
self.edge_count_history.append(total_contours)
for i, edge_map in enumerate(edge_maps):
mean_intensity = float(np.mean(edge_map))
self.scale_statistics[i].append(mean_intensity)
if len(self.scale_statistics[i]) > 20:
self.scale_statistics[i].pop(0)
if len(self.edge_count_history) > 10:
self.edge_count_history.pop(0)
if len(self.edge_count_history) == 10:
for i in range(4):
if len(self.scale_statistics[i]) >= 10:
scale_mean = float(np.mean(self.scale_statistics[i]))
target_mean = 0.2 if i < 2 else 0.15
# 修正:閾値調整ロジックを逆転
if scale_mean > target_mean * 1.3:
# 平均強度が高い場合は閾値を下げる(検出を抑制)
self.thresholds[i] = max(0.15, self.thresholds[i] - 0.03)
elif scale_mean < target_mean * 0.7:
# 平均強度が低い場合は閾値を上げる(検出を増やす)
self.thresholds[i] = min(0.8, self.thresholds[i] + 0.03)
avg_count = float(np.mean(self.edge_count_history))
if avg_count < 10 or avg_count > 100:
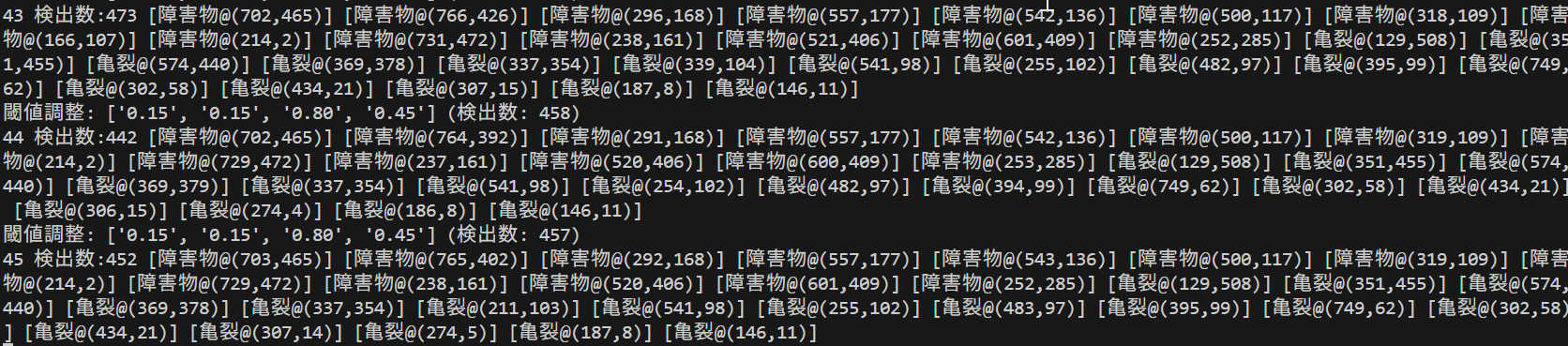
print(f"閾値調整: {[f'{t:.2f}' for t in self.thresholds]} (検出数: {avg_count:.0f})")
return self.thresholds
# ========== 幾何ユーティリティ ==========
def is_linear_obstacle(contour, image_shape):
img_diagonal = float(np.sqrt(image_shape[0]**2 + image_shape[1]**2))
min_length = img_diagonal * 0.05
perimeter = cv2.arcLength(contour, True)
if perimeter < min_length:
return False
rect = cv2.minAreaRect(contour)
width, height = rect[1]
if min(width, height) > 0:
aspect_ratio = max(width, height) / min(width, height)
return aspect_ratio > 8.0
return False
# ========== マルチスケール異常検出 ==========
def detect_anomalies_multiscale(edge_maps, thresholds, image_shape):
final_edge, edge1, edge2, edge3, edge4 = edge_maps
scale_edges = [edge1, edge2, edge3, edge4]
anomalies = []
total_contours = 0
colored_frame = np.zeros((final_edge.shape[0], final_edge.shape[1], 3), dtype=np.uint8)
for scale_idx, (edge_map, threshold) in enumerate(zip(scale_edges, thresholds)):
binary_edge = (edge_map > threshold).astype(np.uint8) * 255
if scale_idx < 2:
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2, 2))
else:
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))
binary_edge = cv2.morphologyEx(binary_edge, cv2.MORPH_CLOSE, kernel)
contours, _ = cv2.findContours(binary_edge, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
total_contours += len(contours)
for contour in contours:
area = cv2.contourArea(contour)
min_area = 50 + (scale_idx * 25)
if area < min_area:
continue
if is_linear_obstacle(contour, image_shape):
anomaly_type = '障害物'
color = (0, 0, 255)
else:
if scale_idx == 0:
anomaly_type = '細部異常'
color = (255, 0, 0)
elif scale_idx == 1:
anomaly_type = 'ひび'
color = (0, 255, 0)
elif scale_idx == 2:
anomaly_type = '汚れ'
color = (0, 255, 255)
else:
anomaly_type = '亀裂'
color = (0, 165, 255)
M = cv2.moments(contour)
if M['m00'] != 0:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
anomalies.append({'type': anomaly_type, 'location': (cx, cy), 'scale': scale_idx + 1, 'area': area})
cv2.drawContours(colored_frame, [contour], -1, color, 2)
cv2.circle(colored_frame, (cx, cy), 5, color, -1)
return anomalies, colored_frame, total_contours
# ========== フォント ==========
def initialize_font():
try:
if os.path.exists(FONT_PATH):
font = ImageFont.truetype(FONT_PATH, FONT_SIZE)
print("日本語フォント読み込み成功")
else:
print("日本語フォントが見つかりません。デフォルトフォントを使用します。")
font = ImageFont.load_default()
except Exception as e:
print(f"フォント読み込みエラー: {e}")
font = ImageFont.load_default()
return font
# ========== モデルファイルDL ==========
def download_official_weight(dst_path=OFFICIAL_MODEL_PATH, url=OFFICIAL_DOWNLOAD_URL, force=False):
if os.path.exists(dst_path) and not force:
print('既存の公式モデルファイルを使用します')
return dst_path
print('PiDiNet公式重みをダウンロード中...')
try:
urllib.request.urlretrieve(url, dst_path)
print('ダウンロード完了')
except Exception as e:
print(f'公式モデルダウンロードエラー: {e}')
return dst_path
# ========== 入力前処理 ==========
def preprocess_frame(frame_bgr, device, norm_mode='imagenet', input_size=(512, 512)):
mean, std = get_normalize_tensors(norm_mode, device)
img = cv2.resize(frame_bgr, input_size)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ten = torch.from_numpy(img.transpose(2, 0, 1)).float().to(device) / 255.0
ten = (ten - mean) / std
ten = ten.unsqueeze(0)
return ten
# ========== グローバル ==========
frame_count = 0
results_log = []
model_wrapper = None
adaptive_threshold_system = None
global_font = None
norm_mode_runtime = NORM_MODE
# ========== メイン処理 ==========
def video_frame_processing(frame):
global frame_count, model_wrapper, adaptive_threshold_system, global_font
current_time = time.time()
frame_count += 1
input_tensor = preprocess_frame(frame, device, norm_mode=norm_mode_runtime, input_size=(512, 512))
with torch.no_grad():
outputs = model_wrapper(input_tensor)
fused = torch.sigmoid(outputs[0]).squeeze().cpu().numpy()
s1 = torch.sigmoid(outputs[1]).squeeze().cpu().numpy()
s2 = torch.sigmoid(outputs[2]).squeeze().cpu().numpy()
s3 = torch.sigmoid(outputs[3]).squeeze().cpu().numpy()
s4 = torch.sigmoid(outputs[4]).squeeze().cpu().numpy()
del outputs
del input_tensor
if device.type == 'cuda':
torch.cuda.empty_cache()
fused = cv2.resize(fused, (frame.shape[1], frame.shape[0]))
s1 = cv2.resize(s1, (frame.shape[1], frame.shape[0]))
s2 = cv2.resize(s2, (frame.shape[1], frame.shape[0]))
s3 = cv2.resize(s3, (frame.shape[1], frame.shape[0]))
s4 = cv2.resize(s4, (frame.shape[1], frame.shape[0]))
edge_maps = (fused, s1, s2, s3, s4)
anomalies, colored_overlay, total_contours = detect_anomalies_multiscale(edge_maps, adaptive_threshold_system.thresholds, frame.shape)
adaptive_threshold_system.update_and_adjust([s1, s2, s3, s4], total_contours)
result_text = f"検出数:{total_contours}"
for anomaly in anomalies:
if anomaly['type'] in ['障害物', '亀裂']:
result_text += f" [{anomaly['type']}@({anomaly['location'][0]},{anomaly['location'][1]})]"
edge_display = (fused * 255).astype(np.uint8)
edge_colored = cv2.cvtColor(edge_display, cv2.COLOR_GRAY2BGR)
processed_frame = cv2.addWeighted(edge_colored, 0.7, colored_overlay, 0.3, 0)
try:
img_pil = Image.fromarray(cv2.cvtColor(processed_frame, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(img_pil)
draw.text((10, 10), f'フレーム: {frame_count}', font=global_font, fill=(255, 255, 255))
draw.text((10, 35), f'検出数: {total_contours}', font=global_font, fill=(255, 255, 255))
draw.text((10, 60), f'モデル: OfficialPiDiNet', font=global_font, fill=(0, 255, 0))
draw.text((10, 85), f'正規化: {norm_mode_runtime}', font=global_font, fill=(0, 200, 255))
y_offset = 115
draw.text((10, y_offset), '【検出色分け】', font=global_font, fill=(255, 255, 255))
draw.text((10, y_offset + 25), '赤: 障害物', font=global_font, fill=(255, 0, 0))
draw.text((10, y_offset + 50), '青: 細部異常', font=global_font, fill=(0, 0, 255))
draw.text((10, y_offset + 75), '緑: ひび', font=global_font, fill=(0, 255, 0))
draw.text((10, y_offset + 100), '黄: 汚れ', font=global_font, fill=(255, 255, 0))
draw.text((10, y_offset + 125), '橙: 亀裂', font=global_font, fill=(255, 165, 0))
processed_frame = cv2.cvtColor(np.array(img_pil), cv2.COLOR_RGB2BGR)
except Exception:
pass
return processed_frame, result_text, current_time
# ========== 初期化 ==========
print("=" * 60)
print("PiDiNetによる動画エッジ検出と異常検出(公式実装版)")
print("=" * 60)
print("【概要】PiDiNet公式アーキテクチャで重みを適用します。")
print()
global_font = initialize_font()
# 公式重みのダウンロード(必要に応じて再DL)
download_official_weight(OFFICIAL_MODEL_PATH, OFFICIAL_DOWNLOAD_URL, force=FORCE_REDWN)
# モデル初期化
try:
model_wrapper = EdgeModelWrapper(official_weight_path=OFFICIAL_MODEL_PATH).to(device)
model_wrapper.eval()
except SystemExit as e:
print(str(e))
print('提案: OFFICIAL_MODEL_PATH を削除またはFORCE_REDWN=1で再ダウンロード後に再実行すること。')
raise
adaptive_threshold_system = AdaptiveThresholdSystem()
print('\n動画ソースを選択してください:')
print('0: 動画ファイル')
print('1: カメラ')
print('2: サンプル動画')
choice = input('選択: ')
if choice == '0':
root = tk.Tk()
root.withdraw()
path = filedialog.askopenfilename()
if not path:
exit()
cap = cv2.VideoCapture(path)
elif choice == '1':
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
if not cap.isOpened():
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
else:
SAMPLE_URL = 'https://raw.githubusercontent.com/opencv/opencv/master/samples/data/vtest.avi'
SAMPLE_FILE = 'vtest.avi'
try:
urllib.request.urlretrieve(SAMPLE_URL, SAMPLE_FILE)
except Exception as e:
print(f'サンプル動画ダウンロードエラー: {e}')
cap = cv2.VideoCapture(SAMPLE_FILE)
if not cap.isOpened():
print('動画ファイル・カメラを開けませんでした')
exit()
print('\n=== 動画処理開始 ===')
print('操作方法: q キーで終了')
try:
while True:
ret, frame = cap.read()
if not ret:
break
MAIN_FUNC_DESC = "PiDiNetエッジ検出"
processed_frame, result, current_time = video_frame_processing(frame)
cv2.imshow(MAIN_FUNC_DESC, processed_frame)
if choice == '1':
print(datetime.fromtimestamp(current_time).strftime("%Y-%m-%d %H:%M:%S.%f")[:-3], result)
else:
print(frame_count, result)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
print('\n=== プログラム終了 ===')
cap.release()
cv2.destroyAllWindows()