ガイデッドフィルタ画像処理(入力:静止画)(ソースコードと説明と利用ガイド)
プログラム利用ガイド
ツール利用ガイド
1. このプログラムの利用シーン
画像のノイズ除去やテクスチャ平滑化を行いながら、エッジ構造を保持したい場合に使用する。写真のノイズ低減、HDR画像の圧縮、画像のディテール強調などの用途に適している。
2. 主な機能
- エッジ保存型スムージング: エッジを保持しながらノイズやテクスチャを除去する。
- 複数入力ソース対応: 画像ファイル、ウェブカメラ、サンプル画像から選択できる。
- パラメータ調整: 局所ウィンドウ半径(radius)と正則化パラメータ(eps)を設定できる。
- 処理結果の保存: フィルタリング結果を連番PNG画像として保存する。
- 処理履歴の記録: パラメータ、入力ファイル名、処理日時をresult.txtに記録する。
3. 基本的な使い方
- 起動と入力の選択:
キーボードで 0(画像ファイル)、1(カメラ)、2(サンプル画像)のいずれかを入力し、Enterキーを押す。
- 画像ファイルの選択(0を選択した場合):
ファイル選択ダイアログで処理する画像を選択する。複数選択が可能である。
- カメラ撮影(1を選択した場合):
カメラ映像が表示される。スペースキーで撮影し、フィルタリングを実行する。qキーで終了する。
- 結果の確認:
処理結果が画面に表示され、0001.png, 0002.png...として保存される。
4. 便利な機能
- 複数画像の一括処理: 画像ファイル選択時に複数ファイルを選択すると、連続して処理される。
- 処理履歴の確認: result.txtに処理パラメータと日時が記録され、後から確認できる。
- パラメータ調整: プログラム冒頭のGUIDED_FILTER_RADIUSとGUIDED_FILTER_EPSを変更することで、フィルタリング効果を調整できる。
Python開発環境,ライブラリ類
ここでは、最低限の事前準備について説明する。機械学習や深層学習を行う場合は、NVIDIA CUDA、Visual Studio、Cursorなどを追加でインストールすると便利である。これらについては別ページ https://www.kkaneko.jp/cc/dev/aiassist.htmlで詳しく解説しているので、必要に応じて参照してください。
Python 3.12 のインストール
インストール済みの場合は実行不要。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要である。
REM Python をシステム領域にインストール
winget install --scope machine --id Python.Python.3.12 -e --silent --accept-source-agreements --accept-package-agreements
REM Python のパス設定
set "PYTHON_PATH=C:\Program Files\Python312"
set "PYTHON_SCRIPTS_PATH=C:\Program Files\Python312\Scripts"
echo "%PATH%" | find /i "%PYTHON_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_PATH%" /M >nul
echo "%PATH%" | find /i "%PYTHON_SCRIPTS_PATH%" >nul
if errorlevel 1 setx PATH "%PATH%;%PYTHON_SCRIPTS_PATH%" /M >nul【関連する外部ページ】
Python の公式ページ: https://www.python.org/
AI エディタ Windsurf のインストール
Pythonプログラムの編集・実行には、AI エディタの利用を推奨する。ここでは,Windsurfのインストールを説明する。
管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行して、Windsurfをシステム全体にインストールする。管理者権限は、wingetの--scope machineオプションでシステム全体にソフトウェアをインストールするために必要となる。
winget install --scope machine --id Codeium.Windsurf -e --silent --accept-source-agreements --accept-package-agreements【関連する外部ページ】
Windsurf の公式ページ: https://windsurf.com/
必要なライブラリをシステム領域にインストール
コマンドプロンプトを管理者として実行(手順:Windowsキーまたはスタートメニュー > cmd と入力 > 右クリック > 「管理者として実行」)し、以下を実行する
pip install opencv-python numpy pillow
ガイデッドフィルタ画像処理プログラム
概要
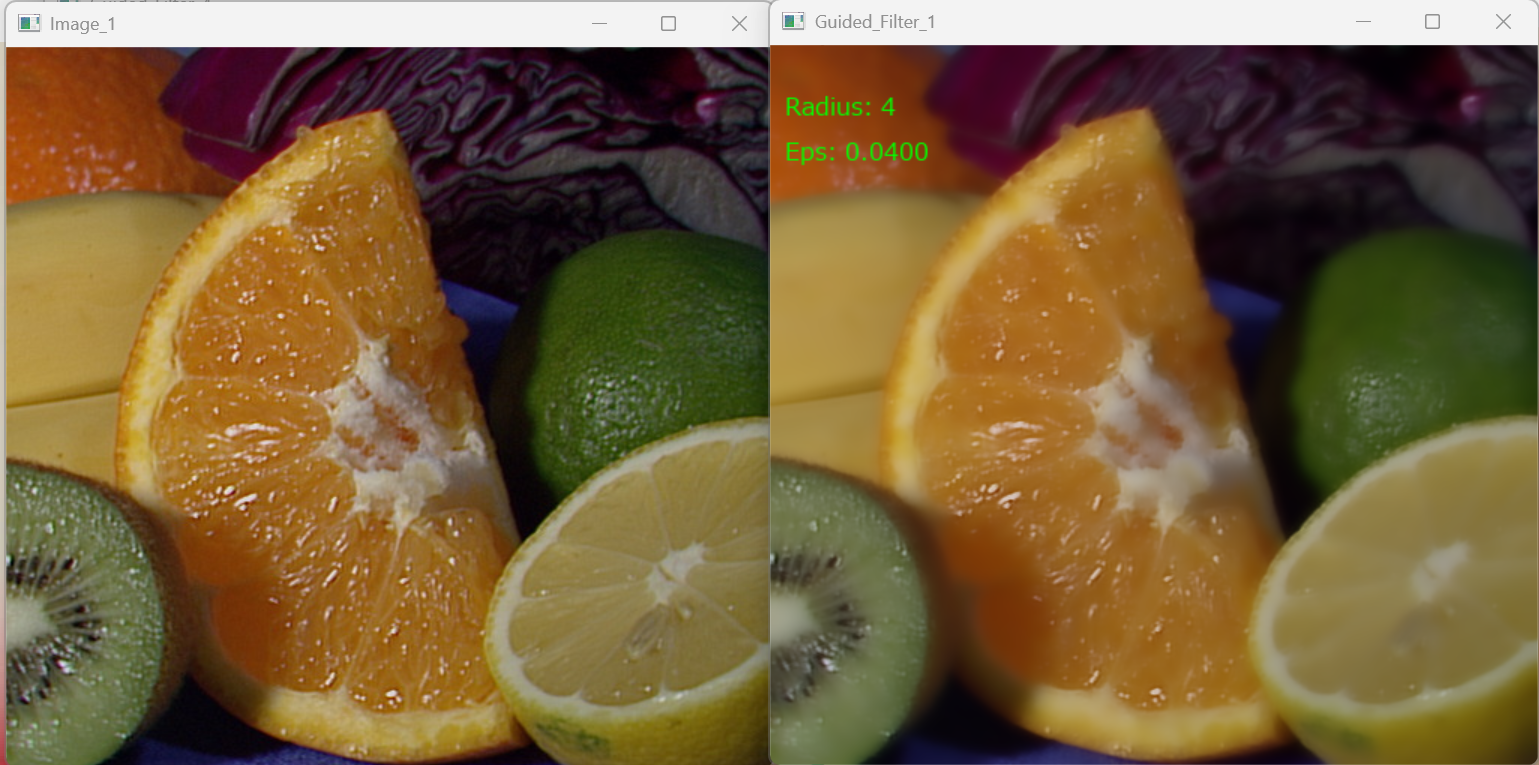
このプログラムは、Guided Filter(ガイデッドフィルタ)を用いた画像処理を実現する。入力画像に対してエッジ保存型スムージングを適用し、ノイズや不要なテクスチャを除去しながらエッジ構造を保持する。
主要技術
Guided Filter
He, Sun, Tangらが2013年に発表したエッジ保存フィルタである[1]。局所線形モデル q = aI + b に基づき、ガイダンス画像Iの構造を保持しながら入力画像pをフィルタリングする。バイラテラルフィルタと比較して、勾配反転アーティファクトが発生しにくく、O(N)時間の線形アルゴリズムを持つ。
解析的逆行列計算
カラーガイダンス処理において、各ピクセルで3×3対称行列の連立方程式を解く必要がある。本実装では、Cramerの公式を用いた解析的計算により、計算量を削減している[2]。
技術的特徴
- 局所線形モデル
各局所ウィンドウ内で出力qが入力Iの線形変換 q = aI + b として表現されると仮定する。この仮定により、∇q = a∇I が成立し、Iのエッジがqに保存される。
- O(N)時間アルゴリズム
積分画像を用いたボックスフィルタ(cv2.boxFilter)により、ウィンドウサイズに依存しない線形時間で局所平均を計算する。これにより、画像全体の処理がピクセル数Nに対して線形時間で完了する。
- カラーガイダンス対応
グレースケールガイダンス(式(7)(8)(10))とカラーガイダンス(式(19)(20)(21))の両方を実装している。カラーガイダンスでは、RGB 3チャンネルの共分散行列Σを計算し、a = (Σ + εU)^(-1) cov(I,p) により線形係数を求める。
- 勾配反転の回避
バイラテラルフィルタでは、エッジ上のピクセルが類似ピクセルを持たない場合、不安定な重み付け平均により勾配が反転する場合がある。Guided Filterは局所線形モデルにより、この問題を回避する。
実装の特色
- 解析的逆行列計算
カラーガイダンス処理において、3×3対称行列の逆行列を余因子行列とCramerの公式を用いて解析的に計算する。行列式、余因子行列の各要素を直接計算することで、演算回数を削減している。
- 境界処理
cv2.boxFilterのborderType=cv2.BORDER_REFLECTにより、画像境界付近でも安定したフィルタリングを実現する。
- 処理結果の記録
フィルタリング結果を連番PNG画像として保存し、処理パラメータ(radius, eps)、入力ファイル名、処理日時をresult.txtに記録する。
- 日本語テキスト描画
Pillowライブラリを用いて、処理画像上にパラメータ情報を描画する。
参考文献
[1] He, K., Sun, J., & Tang, X. (2013). Guided Image Filtering. IEEE Transactions on Pattern Analysis and Machine Intelligence, 35(6), 1397-1409. https://doi.org/10.1109/TPAMI.2012.213
[2] Gonzalez, R. C., & Woods, R. E. (2018). Digital Image Processing (4th ed.). Pearson.
ソースコード
# ガイデッドフィルタ画像処理プログラム
#
# 特徴技術名: Guided Filter(ガイデッドフィルタ)
#
# 出典:
# He, K., Sun, J., & Tang, X. (2013). Guided Image Filtering.
# IEEE Transactions on Pattern Analysis and Machine Intelligence, 35(6), 1397-1409.
#
# 特徴機能:
# エッジ保存型スムージング
# 局所線形モデルに基づくエッジ保存フィルタ。ガイダンス画像の構造を保持しながら、入力画像をフィルタリングする。バイラテラルフィルタと比較して、勾配反転アーティファクトが発生しにくく、O(N)時間のアルゴリズムを持つ。
#
# 学習済みモデル: なし
#
# 特徴技術および学習済みモデルの利用制限:
# アルゴリズムは論文に基づく自前実装。OpenCV(Apache 2ライセンス)、NumPy(BSDライセンス)の基本機能のみ使用。
# 必ず利用者自身でライセンス情報を確認すること。
# 参考: https://opencv.org/license/
# 参考: https://numpy.org/license.html
#
# 方式設計:
# - 関連利用技術:
# * OpenCV (cv2): 画像入出力、ボックスフィルタ(積分画像による局所平均計算)
# * tkinter: ファイル選択ダイアログ
# * NumPy: 画像データ型変換、行列演算
# * Pillow: 日本語テキスト描画
#
# - 入力と出力:
# 入力: 複数の静止画像,カメラ(ユーザは「0:画像ファイル,1:カメラ,2:サンプル画像」のメニューで選択.0:画像ファイルの場合はtkinterで複数ファイル選択可能.1の場合はOpenCVでカメラが開き,スペースキーで撮影(複数回可能).2の場合はhttps://raw.githubusercontent.com/opencv/opencv/master/samples/data/fruits.jpg とhttps://raw.githubusercontent.com/opencv/opencv/master/samples/data/messi5.jpgとhttps://raw.githubusercontent.com/opencv/opencv/master/samples/data/aero3.jpgとhttps://upload.wikimedia.org/wikipedia/commons/3/3a/Cat03.jpgを使用)
# 出力: 処理結果画像を0001.png, 0002.png...として保存、OpenCV画面での表示、result.txtへの処理履歴保存(出力ファイル名、元ファイル名、パラメータ、処理日時)
#
# - 処理手順:
# 1. 入力画像をuint8からfloat64(倍精度浮動小数点)へ変換し、0-1の範囲に正規化
# 2. Guided Filterのパラメータ設定
# - radius: 局所ウィンドウの半径(デフォルト4)
# - eps: 正則化パラメータ(デフォルト0.2^2)
# 3. 各局所ウィンドウで線形係数(a, b)を計算
# - 式(7): a_k = cov(I,p) / (var(I) + eps)
# - 式(8): b_k = mean(p) - a_k * mean(I)
# 4. 線形係数を平均化
# - 式(10): q_i = mean(a) * I_i + mean(b)
# 5. 処理結果を0-255の範囲に戻し、元のデータ型(uint8)へ変換
#
# - 前処理、後処理:
# 前処理: uint8からfloat64への型変換と0-1への正規化により、
# 数値的安定性を確保し精度を向上
# 後処理: float64からuint8への型変換により、画像表示と保存を可能にする
#
# - 追加処理:
# 局所線形モデル: 各局所ウィンドウでq = aI + bの関係を仮定し、
# 入力pとの差を最小化する線形係数を計算する
# 3×3対称行列の逆行列を解析的に計算
#
# - 調整を必要とする設定値:
# * radius(局所ウィンドウ半径): 現在4に設定
# 値が大きいほどスムージング効果が強くなるが、処理時間も増加
# 推奨値: 2~16(用途に応じて調整)
# * eps(正則化パラメータ): 現在0.04に設定
# 値が小さいほどエッジ保存性が高まる
# 推奨値: (0.1)^2~(0.4)^2(用途に応じて調整)
#
# 将来方策:
# 並列処理技術を用いることで、処理時間を短縮できる可能性がある。
# 例: マルチスレッド処理による各ウィンドウの並列計算
#
# その他の重要事項:
# * Windows環境での動作を前提
# * Python 3.10以上で動作
# * opencv-contrib-pythonは不要(標準のopencv-pythonのみで動作)
# * Guided Filterは以下の利点がある:
# - O(N)時間のアルゴリズム
# - 勾配反転アーティファクトの回避
# - エッジ保存型スムージング
# - 構造転送フィルタリング
#
# 前準備:
# pip install opencv-python numpy pillow
import cv2
import tkinter as tk
from tkinter import filedialog
import urllib.request
import time
from datetime import datetime
import numpy as np
from PIL import Image, ImageDraw, ImageFont
import os
# Guided Filterパラメータ
GUIDED_FILTER_RADIUS = 4
GUIDED_FILTER_EPS = 0.2 * 0.2
# フォント設定
FONT_PATH = 'C:/Windows/Fonts/meiryo.ttc'
FONT_SIZE_MAIN = 16
FONT_SIZE_SMALL = 12
try:
font_main = ImageFont.truetype(FONT_PATH, FONT_SIZE_MAIN)
font_small = ImageFont.truetype(FONT_PATH, FONT_SIZE_SMALL)
except:
font_main = None
font_small = None
results_log = []
def draw_texts_with_pillow(bgr_frame, texts):
if font_main is None:
return bgr_frame
img_pil = Image.fromarray(cv2.cvtColor(bgr_frame, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(img_pil)
for item in texts:
text = item['text']
x, y = item['org']
color = item['color']
font_type = item.get('font_type', 'main')
font = font_main if font_type == 'main' else font_small
draw.text((x, y), text, font=font, fill=color)
return cv2.cvtColor(np.array(img_pil), cv2.COLOR_RGB2BGR)
def solve_symmetric_3x3(a00, a01, a02, a11, a12, a22, b0, b1, b2):
"""
対称3×3行列の連立方程式 A * x = b を解析的に解く
入力:
- 対称行列Aの上三角成分: a00, a01, a02, a11, a12, a22
A = [[a00, a01, a02],
[a01, a11, a12],
[a02, a12, a22]]
- 右辺ベクトルb: b0, b1, b2
出力:
- 解ベクトルx: (x0, x1, x2)
手法:Cramerの公式による解析的計算
"""
# 行列式の計算
# det(A) = a00*(a11*a22 - a12*a12) - a01*(a01*a22 - a12*a02) + a02*(a01*a12 - a11*a02)
det = (a00 * (a11 * a22 - a12 * a12) -
a01 * (a01 * a22 - a12 * a02) +
a02 * (a01 * a12 - a11 * a02))
# 特異行列チェック
if abs(det) < 1e-10:
return 0.0, 0.0, 0.0
inv_det = 1.0 / det
# 余因子行列の計算(対称性を利用)
# C = adj(A)^T
C00 = a11 * a22 - a12 * a12
C01 = a02 * a12 - a01 * a22
C02 = a01 * a12 - a02 * a11
C11 = a00 * a22 - a02 * a02
C12 = a01 * a02 - a00 * a12
C22 = a00 * a11 - a01 * a01
# x = A^(-1) * b = (1/det(A)) * adj(A) * b
x0 = inv_det * (C00 * b0 + C01 * b1 + C02 * b2)
x1 = inv_det * (C01 * b0 + C11 * b1 + C12 * b2)
x2 = inv_det * (C02 * b0 + C12 * b1 + C22 * b2)
return x0, x1, x2
def guided_filter(image, guide, radius, eps):
"""
Guided Filter実装(論文Algorithm 1に基づく)
出典: He, K., Sun, J., & Tang, X. (2013). Guided Image Filtering.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 35(6).
image: H×W×3の入力画像(float64, 0-1範囲)
guide: H×W×3のガイド画像(float64, 0-1範囲)
radius: 局所ウィンドウ半径
eps: 正則化パラメータ
"""
if guide is None:
guide = image
if len(image.shape) == 2:
image = image[:, :, np.newaxis]
guide = guide[:, :, np.newaxis]
h, w, c_p = image.shape
_, _, c_I = guide.shape
result = np.zeros((h, w, c_p), dtype=np.float64)
for ch in range(c_p):
p = image[:, :, ch]
if c_I == 3:
# カラーガイダンスの場合(式(19), (20), (21))
I_r = guide[:, :, 0]
I_g = guide[:, :, 1]
I_b = guide[:, :, 2]
# 平均値の計算
mean_I_r = cv2.boxFilter(I_r, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_I_g = cv2.boxFilter(I_g, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_I_b = cv2.boxFilter(I_b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_p = cv2.boxFilter(p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
# 共分散の計算
mean_Ip_r = cv2.boxFilter(I_r * p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_Ip_g = cv2.boxFilter(I_g * p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_Ip_b = cv2.boxFilter(I_b * p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
cov_Ip_r = mean_Ip_r - mean_I_r * mean_p
cov_Ip_g = mean_Ip_g - mean_I_g * mean_p
cov_Ip_b = mean_Ip_b - mean_I_b * mean_p
# 共分散行列Σの計算
var_I_rr = cv2.boxFilter(I_r * I_r, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_r * mean_I_r
var_I_rg = cv2.boxFilter(I_r * I_g, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_r * mean_I_g
var_I_rb = cv2.boxFilter(I_r * I_b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_r * mean_I_b
var_I_gg = cv2.boxFilter(I_g * I_g, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_g * mean_I_g
var_I_gb = cv2.boxFilter(I_g * I_b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_g * mean_I_b
var_I_bb = cv2.boxFilter(I_b * I_b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT) - mean_I_b * mean_I_b
# 線形係数aの計算(式(19))
a_r = np.zeros((h, w), dtype=np.float64)
a_g = np.zeros((h, w), dtype=np.float64)
a_b = np.zeros((h, w), dtype=np.float64)
for i in range(h):
for j in range(w):
# 対称行列の上三角成分(対角成分にepsを加算)
a00 = var_I_rr[i, j] + eps
a01 = var_I_rg[i, j]
a02 = var_I_rb[i, j]
a11 = var_I_gg[i, j] + eps
a12 = var_I_gb[i, j]
a22 = var_I_bb[i, j] + eps
# 右辺ベクトル
b0 = cov_Ip_r[i, j]
b1 = cov_Ip_g[i, j]
b2 = cov_Ip_b[i, j]
# 解析的に解く
x0, x1, x2 = solve_symmetric_3x3(a00, a01, a02, a11, a12, a22, b0, b1, b2)
a_r[i, j] = x0
a_g[i, j] = x1
a_b[i, j] = x2
# 線形係数bの計算(式(20))
b = mean_p - a_r * mean_I_r - a_g * mean_I_g - a_b * mean_I_b
# 係数の平均化
mean_a_r = cv2.boxFilter(a_r, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_a_g = cv2.boxFilter(a_g, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_a_b = cv2.boxFilter(a_b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_b = cv2.boxFilter(b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
# 出力の計算(式(21))
result[:, :, ch] = mean_a_r * I_r + mean_a_g * I_g + mean_a_b * I_b + mean_b
else:
# グレースケールガイダンスの場合(式(7), (8), (10))
I = guide[:, :, 0]
# Algorithm 1に従った実装
mean_I = cv2.boxFilter(I, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_p = cv2.boxFilter(p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
corr_I = cv2.boxFilter(I * I, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
corr_Ip = cv2.boxFilter(I * p, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
var_I = corr_I - mean_I * mean_I
cov_Ip = corr_Ip - mean_I * mean_p
# 式(7), (8)
a = cov_Ip / (var_I + eps)
b = mean_p - a * mean_I
# 式(10)
mean_a = cv2.boxFilter(a, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
mean_b = cv2.boxFilter(b, cv2.CV_64F, (2*radius+1, 2*radius+1), normalize=True, borderType=cv2.BORDER_REFLECT)
result[:, :, ch] = mean_a * I + mean_b
return result
def image_processing(bgr_img):
img_float64 = bgr_img.astype('float64') / 255.0
processed_float64 = guided_filter(
image=img_float64,
guide=img_float64,
radius=GUIDED_FILTER_RADIUS,
eps=GUIDED_FILTER_EPS
)
processed_img = np.clip(processed_float64 * 255.0, 0, 255).astype(bgr_img.dtype)
texts = [
{'text': f'Radius: {GUIDED_FILTER_RADIUS}', 'org': (10, 30), 'color': (0, 255, 0), 'font_type': 'main'},
{'text': f'Eps: {GUIDED_FILTER_EPS:.4f}', 'org': (10, 60), 'color': (0, 255, 0), 'font_type': 'main'}
]
processed_img_display = draw_texts_with_pillow(processed_img.copy(), texts)
return processed_img, processed_img_display, time.time()
def process_and_display_images(image_sources, source_type):
idx = 1
results = []
for source in image_sources:
img = cv2.imread(source) if source_type == 'file' else source
if img is None:
continue
processed_img, processed_img_display, current_time = image_processing(img)
output_filename = f"{idx:04d}.png"
cv2.imwrite(output_filename, processed_img)
if source_type == 'file':
source_name = os.path.basename(source)
else:
source_name = f"Camera_{idx}"
results.append({
'original': img,
'processed': processed_img_display,
'output_file': output_filename,
'source_name': source_name,
'time': current_time,
'index': idx
})
timestamp = datetime.fromtimestamp(current_time).strftime("%Y-%m-%d %H:%M:%S.%f")[:-3]
print(f"{timestamp} {output_filename} を保存しました")
results_log.append({
'index': idx,
'output_file': output_filename,
'source_name': source_name,
'radius': GUIDED_FILTER_RADIUS,
'eps': GUIDED_FILTER_EPS,
'timestamp': timestamp
})
idx += 1
for item in results:
cv2.imshow(f'Image_{item["index"]}', item['original'])
cv2.imshow(f'Guided_Filter_{item["index"]}', item['processed'])
print("=" * 60)
print("Guided Filter画像処理プログラム(自前実装版)")
print("=" * 60)
print("\n操作方法:")
print("0: 画像ファイルを選択")
print("1: カメラを使用(スペースキーで処理、qキーで終了)")
print("2: サンプル画像を使用")
print("-" * 60)
choice = input("選択してください (0/1/2): ")
try:
if choice == '0':
root = tk.Tk()
root.withdraw()
if not (paths := filedialog.askopenfilenames(
title="画像ファイルを選択",
filetypes=[("画像ファイル", "*.jpg *.jpeg *.png *.bmp"), ("すべてのファイル", "*.*")]
)):
print("ファイルが選択されませんでした。")
exit()
print(f"\n{len(paths)}個のファイルを選択しました。処理を開始します...\n")
process_and_display_images(paths, 'file')
print("\n画像を表示中です。任意のキーを押すと終了します。")
cv2.waitKey(0)
elif choice == '1':
print("\nカメラを起動しています...")
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
if not cap.isOpened():
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
print("カメラが起動しました。")
print(" - スペースキー: 画像を処理")
print(" - qキー: 終了\n")
camera_idx = 1
try:
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow('Camera', frame)
key = cv2.waitKey(1) & 0xFF
if key == ord(' '):
processed_img, processed_img_display, current_time = image_processing(frame)
output_filename = f"{camera_idx:04d}.png"
cv2.imwrite(output_filename, processed_img)
timestamp = datetime.fromtimestamp(current_time).strftime("%Y-%m-%d %H:%M:%S.%f")[:-3]
print(f"{timestamp} {output_filename} を保存しました")
results_log.append({
'index': camera_idx,
'output_file': output_filename,
'source_name': f"Camera_{camera_idx}",
'radius': GUIDED_FILTER_RADIUS,
'eps': GUIDED_FILTER_EPS,
'timestamp': timestamp
})
cv2.imshow('Guided_Filter', processed_img_display)
camera_idx += 1
elif key == ord('q'):
break
finally:
cap.release()
else:
print("\nサンプル画像をダウンロードしています...")
opener = urllib.request.build_opener()
opener.addheaders = [('User-Agent', 'Mozilla/5.0')]
urllib.request.install_opener(opener)
urls = [
"https://raw.githubusercontent.com/opencv/opencv/master/samples/data/fruits.jpg?raw=true",
"https://raw.githubusercontent.com/opencv/opencv/master/samples/data/messi5.jpg?raw=true",
"https://raw.githubusercontent.com/opencv/opencv/master/samples/data/aero3.jpg?raw=true",
"https://upload.wikimedia.org/wikipedia/commons/3/3a/Cat03.jpg"
]
files = []
for i, url in enumerate(urls):
try:
urllib.request.urlretrieve(url, f"sample_{i}.jpg")
files.append(f"sample_{i}.jpg")
print(f"sample_{i}.jpg をダウンロードしました")
except Exception as e:
print(f"画像のダウンロードに失敗しました: {url}")
print(f"エラー: {e}")
if files:
print(f"\n{len(files)}個のサンプル画像の処理を開始します...\n")
process_and_display_images(files, 'file')
print("\n画像を表示中です。任意のキーを押すと終了します。")
cv2.waitKey(0)
else:
print("\nサンプル画像のダウンロードに失敗しました。")
finally:
print('\n' + "=" * 60)
print('プログラムを終了します')
print("=" * 60)
cv2.destroyAllWindows()
if results_log:
with open('result.txt', 'w', encoding='utf-8') as f:
f.write('=' * 80 + '\n')
f.write('Guided Filter 処理結果\n')
f.write('=' * 80 + '\n\n')
for item in results_log:
f.write(f"No.{item['index']:04d}\n")
f.write(f" 出力ファイル: {item['output_file']}\n")
f.write(f" 元ファイル名: {item['source_name']}\n")
f.write(f" パラメータ : radius={item['radius']}, eps={item['eps']}\n")
f.write(f" 処理日時 : {item['timestamp']}\n")
f.write('-' * 80 + '\n')
f.write('\n' + '=' * 80 + '\n')
f.write(f'合計 {len(results_log)} 件の画像を処理しました\n')
f.write('=' * 80 + '\n')
print(f'\n処理結果をresult.txtに保存しました({len(results_log)}件)')